Last night Blakesley Burkhart and I gave a talk on the Breakthrough Starshot project at the Harvard-Smithsonian Center for AstrophysicsObservatory Night. This is a really great monthly event that is free and open to the public. I highly recommend checking it out if you’re in the Boston area. Here’s a video of the talk:
I just got back from the 2017 Breakthrough Discuss Conference at Stanford. It was a fascinating couple of days hearing about the latest exoplanet discoveries from the astronomers themselves, as well as recent developments in SETI and the search for life outside our solar system. Many videos from the conference are being uploaded to YouTube and I highly recommend checking them out. I gave a talk on the stability of laser-propelled sails for Starshot, and a photographer caught this great picture of me doing a little experiment:
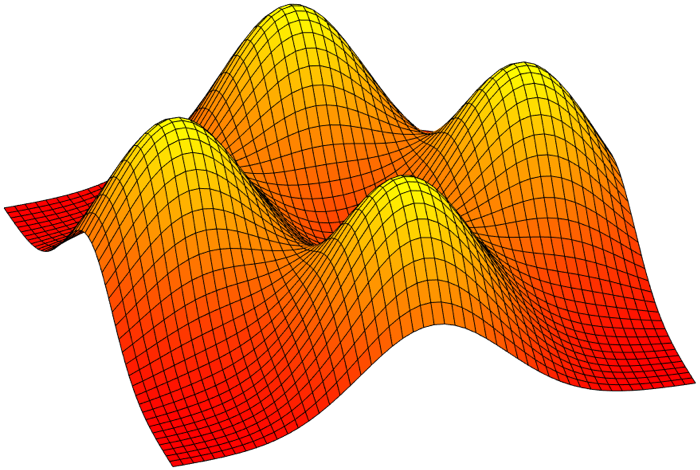
A paper I wrote together with Avi Loeb on the stability of laser-propelled light sails just appeared in the Astrophysical Journal Letters today. The paper takes a look at how to make sure a sail being pushed by a laser beam, like the one proposed for Breakthrough Starshot, actually stays on the beam without getting pushed off. We found that a cone-shaped sail riding on a Gaussian beam, which has been suggested as a possible architecture for Starshot, is unstable without active feedback control or other modifications. Instead, we suggested a hollow spherical sail — like a shiny balloon — riding on a special hollowed-out beam shape (shown in the picture below). This architecture has passive stability while also allowing the payload to be sheilded from the laser beam inside the sphere. If you’re interested in the details, a preprint of the paper is available on the ArXiv.
Today I gave a lunch talk at the Harvard-Smithsonian Center for Astrophysics on some work I’ve been doing for the Breakthrough Starshot project. In particular, I’ve been trying to figure out how to make sure the lightsail stays on the laser beam as it is accelerated. In the video below, I talk about some analysis on different beam and sail configurations and thier stability properties. You can also check out a draft of the paper on ArXiv for all of the gory mathematical details.
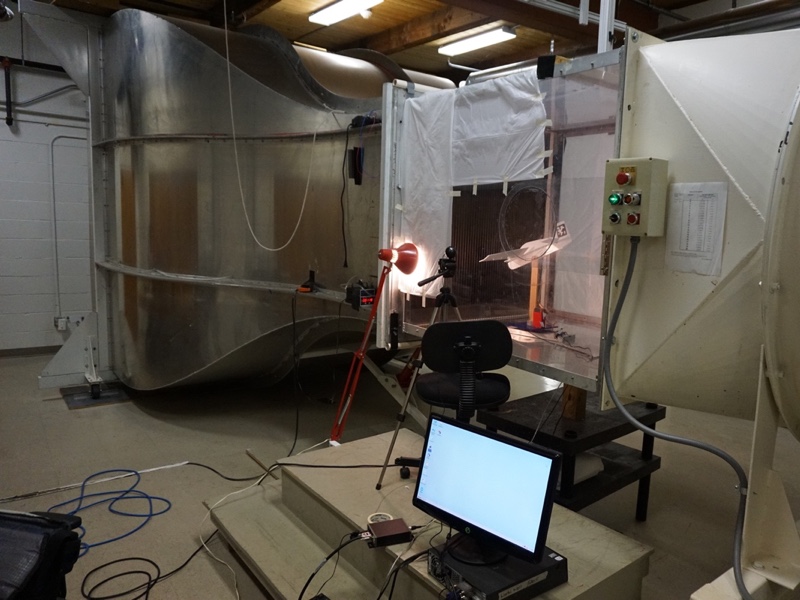
I just got back from the 2017 AIAA SciTech Conference in Grapevine, Texas. The conference was a great opportunity to learn about a whole bunch of interesting small satellite and UAV work going on around the world. I presented two papers: one on spacecraft inertia estimation that grew out of my PhD work on KickSat, and one on some new micro aerial vehicle (MAV) perching work I’m doing in my postdoc at Harvard. The picture below shows the wind tunnel test rig I built to measure the aerodynamic coefficients (lift, drag, and pitching moment) of our MAV prototypes. Check out the papers and slides from my talks if you’re interested.
There was an article in today’s Boston Globe that discussed my work on KickSat and the potential for future space missions built around swarms of small satellites.
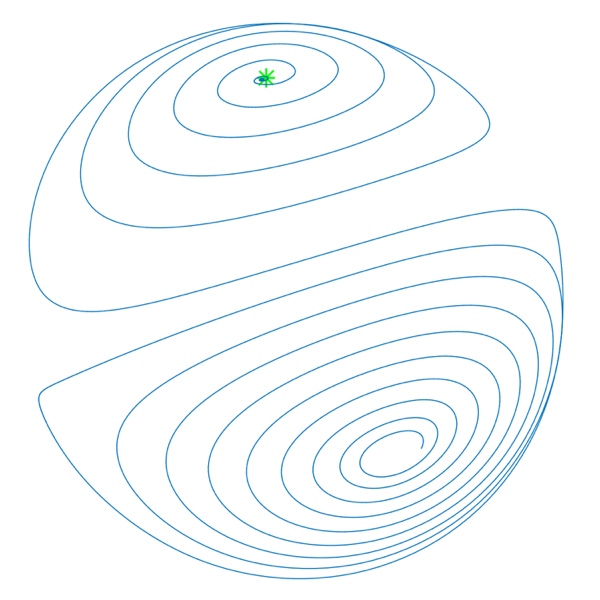
I just got back from the 2016 AIAA Space Conference in Long Beach, California where I presented a paper that grew out of some work I did on KickSat related the classic flat-spin recovery problem. A flat spin occurs when a spacecraft that is intended to spin about its minor axis of inertia (long axis) finds itself spinning about its major axis of inertia (short axis). This problem dates back all the way to Explorer 1, the first satellite launched by the U.S., and a variety of solutions have been proposed over the years. Most of them, however, are not able to control the polarity of the spacecraft as it comes out of the flat spin, possibly resulting in a 180 degree rotation from the desired orientation.
I discovered a Lyapunov-based controller law that solves this problem, guaranteeing that a spinning spacecraft will return to the desired final spin orientation. In math lingo, the control law is almost-globally asymptotically stabilizing. If you’re still with me, have a look at the paper. Here’s a plot of the trajectory traced out by the angular momentum vector of a satellite during a flat spin recovery using the new controller: