UDP Paper Accepted to CDC 2016
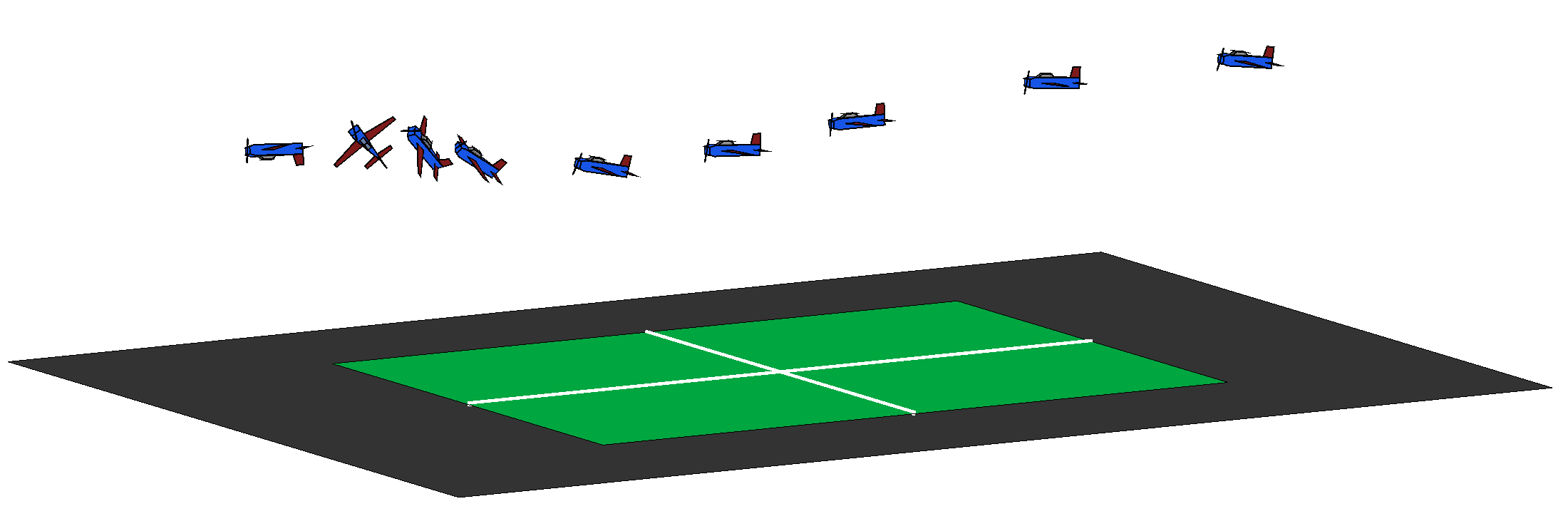
18 Aug 2016My advisor at Harvard, Scott Kuindersma, and I just had our paper “Derivative-Free Trajectory Optimization with Unscented Dynamic Programming” accepted to the 2016 IEEE Conference on Decision and Control. The paper describes a new trajectory optimization algorithm we developed that takes the classic Differential Dynamic Programming algorithm and applies some ideas from the Unscented Kalman Filter to eliminate the need for derivatives and improve performance. We’re calling it Unscented Dynamic Programming, or UDP for short. Here’s an example I made for the paper that calculates a barrel-roll trajectory for an airplane using the minimum-possible control effort: